Georgi Tinchev
Georgi Tinchev
Home
Skills
Experience
Publications
Contact
CV
1
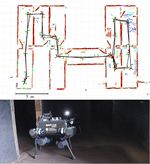
InstaLoc: One-shot Global Lidar Localisation in Indoor Environments through Instance Learning
In this paper we adapt a localization algorithm to work indoors with the help of panoptic segmentation and feature description. The method was tested in multiple real-world scenarios using a hand-held sensor.
Lintong Zhang
,
Tejaswi Digumarti
,
Georgi Tinchev
,
Maurice Fallon
PDF
Cite
DOI
Diffusion-based accent modelling in speech synthesis
In this paper we model accents by adding extra conditioning to a diffusion model. We also convert the accent by using saliency to achieve accent inpainting in melspectrograms.
Kamil Deja
,
Georgi Tinchev
,
Marta Czarnowska
,
Marius Cotescu
,
Jasha Droppo
PDF
Cite
Source Document
Modelling low-resource accents without accent-specific TTS frontend
In this paper we model accented speech by providing aditional data via voice augmentation. This leads to reliable accent generation without a TTS frontend.
Georgi Tinchev
,
Marta Czarnowska
,
Kamil Deja
,
Kayoko Yanagisawa
,
Marius Cotescu
PDF
Cite
Source Document
DOI
Universal Neural Vocoding with Parallel Wavenet
In this paper we propose a new method for universal vocoding allowing us to substitute 43 individual vocoding models speaking 20 languages in 17 styles of different age and geneder.
Yunlong Jiao
,
Adam Gabryś
,
Georgi Tinchev
,
Bartosz Putrycz
,
Daniel Korzekwa
,
Viacheslav Klimkov
PDF
Cite
DOI
𝕏 Resolution Correspondence Networks
In this paper we investigate state-of-the-art dense correspondence networks and their ability to process high-resolution images. This leads to discovery of the existence of an optimal resolution 𝕏.
Georgi Tinchev
,
Shuda Li
,
Kai Han
,
David Mitchell
,
Rigas Kouskouridas
PDF
Cite
Code
𝕏 Resolution Correspondence Networks
In this paper we investigate state-of-the-art dense correspondence networks and their ability to process high-resolution images. This leads to discovery of the existence of an optimal resolution 𝕏.
Georgi Tinchev
,
Shuda Li
,
Kai Han
,
David Mitchell
,
Rigas Kouskouridas
PDF
Cite
Code
Online LiDAR-SLAM for Legged Robots with Robust Registration and Deep-Learned Loop Closure
In this paper we propose a new SLAM method with a novel risk alignment prediction method that verifies the registration.
Milad Ramezani
,
Georgi Tinchev
,
Egor Iuganov
,
Maurice Fallon
PDF
Cite
Video
DOI
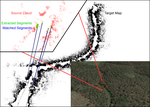
Seeing the Wood for the Trees: Reliable Localization in Urban and Natural Environments
In this paper we propose a novel LIDAR localization method that works in challenging natural environments.
Georgi Tinchev
,
Simona Nobili
,
Maurice Fallon
PDF
Cite
Project
Video
DOI
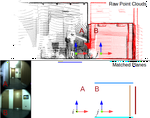
Predicting Alignment Risk to Prevent Localization Failure
In this paper we propose a novel method for assessing the risk of registration failure when aligning two point clouds.
Simona Nobili
,
Georgi Tinchev
,
Maurice Fallon
PDF
Cite
Video
DOI
Cite
×